How to Read the Files Uploaded on My Arduino Mega Board
Watch Now This tutorial has a related video form created by the Existent Python squad. Watch it together with the written tutorial to deepen your understanding: Arduino With Python: How to Get Started
Microcontrollers have been effectually for a long fourth dimension, and they're used in everything from circuitous mechanism to common household appliances. However, working with them has traditionally been reserved for those with formal technical training, such as technicians and electrical engineers. The emergence of Arduino has made electronic application pattern much more than accessible to all developers. In this tutorial, y'all'll discover how to utilize Arduino with Python to develop your own electronic projects.
Y'all'll cover the basics of Arduino with Python and learn how to:
- Set up electronic circuits
- Set up the Firmata protocol on Arduino
- Write basic applications for Arduino in Python
- Command analog and digital inputs and outputs
- Integrate Arduino sensors and switches with college-level apps
- Trigger notifications on your PC and send emails using Arduino
The Arduino Platform
Arduino is an open-source platform composed of hardware and software that allows for the rapid development of interactive electronics projects. The emergence of Arduino drew the attention of professionals from many unlike industries, contributing to the start of the Maker Motility.
With the growing popularity of the Maker Movement and the concept of the Internet of Things, Arduino has become one of the master platforms for electronic prototyping and the evolution of MVPs.
Arduino uses its own programming linguistic communication, which is similar to C++. Notwithstanding, it'due south possible to use Arduino with Python or another high-level programming linguistic communication. In fact, platforms similar Arduino piece of work well with Python, especially for applications that require integration with sensors and other physical devices.
All in all, Arduino and Python tin facilitate an effective learning environs that encourages developers to become into electronics blueprint. If you already know the basics of Python, so you lot'll be able to get started with Arduino by using Python to control it.
The Arduino platform includes both hardware and software products. In this tutorial, you'll apply Arduino hardware and Python software to larn about basic circuits, as well every bit digital and analog inputs and outputs.
Arduino Hardware
To run the examples, you'll need to assemble the circuits past hooking up electronic components. Yous can generally notice these items at electronic component stores or in good Arduino starter kits. You'll need:
- An Arduino Uno or other compatible board
- A standard LED of whatever color
- A push
- A 10 KOhm potentiometer
- A 470 Ohm resistor
- A 10 KOhm resistor
- A breadboard
- Jumper wires of various colors and sizes
Let'south take a closer look at a few of these components.
Component 1 is an Arduino Uno or other compatible board. Arduino is a project that includes many boards and modules for different purposes, and Arduino Uno is the most basic amongst these. Information technology's also the most used and well-nigh documented board of the whole Arduino family, and so it'southward a great choice for developers who are simply getting started with electronics.
Components 5 and vi are resistors. Most resistors are identified by colored stripes according to a colour code. In general, the start iii colors stand for the value of a resistor, while the 4th colour represents its tolerance. For a 470 Ohm resistor, the start three colors are yellow, violet, and brown. For a 10 KOhm resistor, the outset 3 colors are dark-brown, black, and orangish.
Component 7 is a breadboard, which you apply to claw upward all the other components and assemble the circuits. While a breadboard is non required, it'due south recommended that y'all go one if yous intend to begin working with Arduino.
Arduino Software
In addition to these hardware components, you'll need to install some software. The platform includes the Arduino IDE, an Integrated Development Environment for programming Arduino devices, among other online tools.
Arduino was designed to allow y'all to program the boards with little difficulty. In general, you'll follow these steps:
- Connect the board to your PC
- Install and open the Arduino IDE
- Configure the board settings
- Write the code
- Press a button on the IDE to upload the program to the lath
To install the Arduino IDE on your computer, download the appropriate version for your operating system from the Arduino website. Cheque the documentation for installation instructions:
- If you're using Windows, then use the Windows installer to ensure you download the necessary drivers for using Arduino on Windows. Cheque the Arduino documentation for more than details.
- If you're using Linux, and then you may have to add your user to some groups in social club to utilize the serial port to program Arduino. This procedure is described in the Arduino install guide for Linux.
- If you're using macOS, then you tin can install Arduino IDE past following the Arduino install guide for OS X.
Now that y'all've installed the Arduino IDE and gathered all the necessary components, you're prepare to go started with Arduino! Next, you'll upload a "Hullo, World!" plan to your board.
"Hello, World!" With Arduino
The Arduino IDE comes with several example sketches yous can use to learn the nuts of Arduino. A sketch is the term you utilise for a plan that you lot can upload to a board. Since the Arduino Uno doesn't have an attached display, you'll demand a way to see the physical output from your program. You lot'll employ the Glimmer example sketch to make a born LED on the Arduino board blink.
Uploading the Blink Instance Sketch
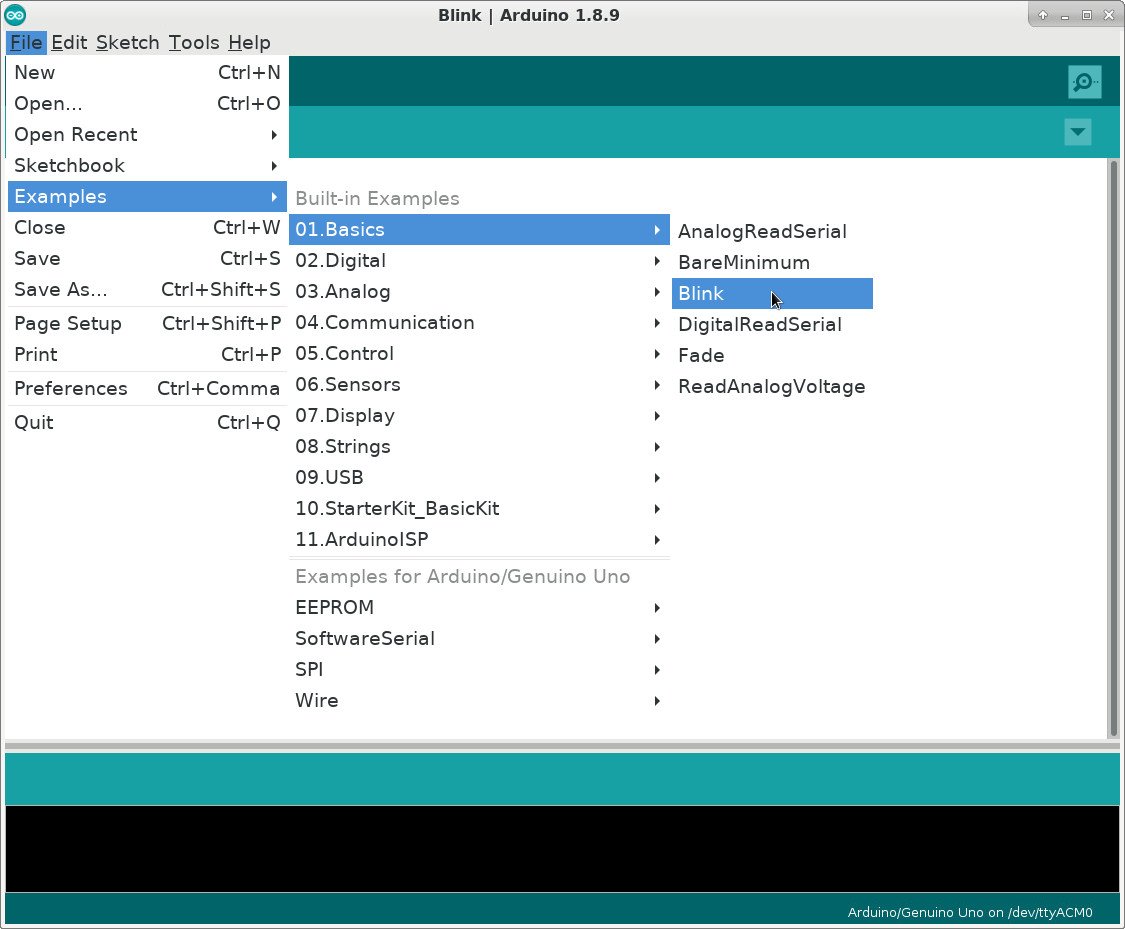
To become started, connect the Arduino lath to your PC using a USB cable and start the Arduino IDE. To open the Blink example sketch, access the File menu and select Examples, and then 01.Nuts and, finally, Blink:
The Blink example lawmaking will be loaded into a new IDE window. But before you lot can upload the sketch to the board, y'all'll need to configure the IDE by selecting your board and its continued port.
To configure the lath, access the Tools carte and and then Board. For Arduino Uno, yous should select Arduino/Genuino Uno:

Later on y'all select the board, you have to set the appropriate port. Access the Tools carte du jour over again, and this fourth dimension select Port:

The names of the ports may be different, depending on your operating system. In Windows, the ports will be named COM4, COM5, or something similar. In macOS or Linux, you may run across something like /dev/ttyACM0 or /dev/ttyUSB0. If you have whatsoever problems setting the port, and so take a look at the Arduino Troubleshooting Folio.
Afterwards you've configured the board and port, you lot're all ready to upload the sketch to your Arduino. To do that, you just have to press the Upload push in the IDE toolbar:

When yous press Upload, the IDE compiles the sketch and uploads it to your board. If yous want to check for errors, and so yous can printing Verify earlier Upload, which volition only compile your sketch.
The USB cable provides a series connexion to both upload the program and power the Arduino board. During the upload, you'll see LEDs flashing on the board. Later on a few seconds, the uploaded programme will run, and you lot'll see an LED low-cal blink once every second:
Subsequently the upload is finished, the USB cable will go on to power the Arduino lath. The program is stored in flash memory on the Arduino microcontroller. Yous can as well use a bombardment or other external power supply to run the application without a USB cable.
Connecting External Components
In the previous section, you used an LED that was already present on the Arduino lath. However, in most applied projects y'all'll demand to connect external components to the board. To make these connections, Arduino has several pins of different types:

Although these connections are commonly called pins, you can see that they're not exactly physical pins. Rather, the pins are holes in a socket to which you lot can connect jumper wires. In the effigy higher up, you lot can meet different groups of pins:
- Orange rectangle: These are 13 digital pins that you can employ as inputs or outputs. They're only meant to piece of work with digital signals, which have 2 unlike levels:
- Level 0: represented by the voltage 0V
- Level 1: represented past the voltage 5V
- Green rectangle: These are 6 analog pins that you can use equally analog inputs. They're meant to work with an arbitrary voltage between 0V and 5V.
- Blue rectangle: These are v power pins. They're mainly used for powering external components.
To go started using external components, you'll connect an external LED to run the Blink example sketch. The built-in LED is connected to digital pin #13. So, allow's connect an external LED to that pin and bank check if it blinks. (A standard LED is i of the components y'all saw listed earlier.)
Before you lot connect anything to the Arduino board, it'due south good practise to disconnect it from the estimator. With the USB cablevision unplugged, you'll be able to connect the LED to your board:

Notation that the effigy shows the board with the digital pins now facing you.
Using a Breadboard
Electronic excursion projects usually involve testing several ideas, with you lot adding new components and making adjustments every bit you lot get. All the same, it tin be tricky to connect components directly, peculiarly if the circuit is large.
To facilitate prototyping, you can use a breadboard to connect the components. This is a device with several holes that are connected in a particular manner then that you can easily connect components using jumper wires:

You lot tin can see which holes are interconnected by looking at the colored lines. You'll utilise the holes on the sides of the breadboard to power the circuit:
- Connect one pigsty on the scarlet line to the power source.
- Connect one hole on the blue line to the footing.
Then, yous tin can easily connect components to the power source or the footing by simply using the other holes on the red and blue lines. The holes in the middle of the breadboard are connected as indicated by the colors. You'll use these to make connections between the components of the circuit. These ii internal sections are separated by a small depression, over which you can connect integrated circuits (ICs).
You can use a breadboard to assemble the circuit used in the Blink example sketch:

For this circuit, information technology's of import to annotation that the LED must be connected according to its polarity or it won't work. The positive terminal of the LED is called the anode and is generally the longer one. The negative final is chosen the cathode and is shorter. If y'all're using a recovered component, then you tin can as well identify the terminals by looking for a flat side on the LED itself. This will indicate the position of the negative terminal.
When you lot connect an LED to an Arduino pin, you'll e'er need a resistor to limit its current and avert called-for out the LED prematurely. Here, you apply a 470 Ohm resistor to do this. You can follow the connections and check that the circuit is the same:
- The resistor is connected to digital pin 13 on the Arduino board.
- The LED anode is continued to the other final of the resistor.
- The LED cathode is continued to the ground (GND) via the blue line of holes.
For a more detailed explanation, check out How to Employ a Breadboard.
Subsequently yous finish the connection, plug the Arduino back into the PC and re-run the Glimmer sketch:
As both LEDs are continued to digital pin 13, they blink together when the sketch is running.
"Hi, World!" With Arduino and Python
In the previous section, you uploaded the Blink sketch to your Arduino board. Arduino sketches are written in a language like to C++ and are compiled and recorded on the flash retentiveness of the microcontroller when you press Upload. While yous tin can utilise another language to directly program the Arduino microcontroller, it's not a trivial task!
Still, there are some approaches you can take to use Arduino with Python or other languages. One idea is to run the main programme on a PC and use the series connection to communicate with Arduino through the USB cable. The sketch would be responsible for reading the inputs, sending the information to the PC, and getting updates from the PC to update the Arduino outputs.
To control Arduino from the PC, you'd have to design a protocol for the communication between the PC and Arduino. For case, you could consider a protocol with messages like the following:
- VALUE OF PIN 13 IS HIGH: used to tell the PC about the status of digital input pins
- SET PIN 11 LOW: used to tell Arduino to set u.s.a. of the output pins
With the protocol defined, you could write an Arduino sketch to send messages to the PC and update united states of america of the pins according to the protocol. On the PC, you could write a plan to control the Arduino through a serial connection, based on the protocol yous've designed. For this, you can use whatever language and libraries you prefer, such every bit Python and the PySerial library.
Fortunately, in that location are standard protocols to do all this! Firmata is ane of them. This protocol establishes a serial communication format that allows you lot to read digital and analog inputs, likewise as send data to digital and analog outputs.
The Arduino IDE includes gear up-fabricated sketches that will drive Arduino through Python with the Firmata protocol. On the PC side, there are implementations of the protocol in several languages, including Python. To get started with Firmata, permit'due south use information technology to implement a "Hi, World!" program.
Uploading the Firmata Sketch
Before you write your Python program to bulldoze Arduino, yous have to upload the Firmata sketch so that you can use that protocol to command the board. The sketch is available in the Arduino IDE's built-in examples. To open it, admission the File card, and so Examples, followed by Firmata, and finally StandardFirmata:

The sketch volition exist loaded into a new IDE window. To upload it to the Arduino, you can follow the same steps y'all did before:
- Plug the USB cablevision into the PC.
- Select the appropriate board and port on the IDE.
- Press Upload.
After the upload is finished, you won't notice any activity on the Arduino. To command it, y'all however need a program that can communicate with the lath through the series connection. To piece of work with the Firmata protocol in Python, you lot'll need the pyFirmata package, which y'all can install with pip:
Afterwards the installation finishes, you lot tin can run an equivalent Blink awarding using Python and Firmata:
1 import pyfirmata two import fourth dimension 3 4 board = pyfirmata . Arduino ( '/dev/ttyACM0' ) 5 half-dozen while True : 7 board . digital [ 13 ] . write ( 1 ) 8 time . slumber ( 1 ) 9 board . digital [ xiii ] . write ( 0 ) 10 fourth dimension . sleep ( 1 ) Hither's how this program works. You import pyfirmata and employ it to establish a serial connection with the Arduino lath, which is represented by the board object in line 4. Y'all also configure the port in this line by passing an argument to pyfirmata.Arduino(). You can use the Arduino IDE to notice the port.
lath.digital is a list whose elements represent the digital pins of the Arduino. These elements take the methods read() and write(), which will read and write the state of the pins. Like almost embedded device programs, this program mainly consists of an space loop:
- In line 7, digital pin 13 is turned on, which turns the LED on for one second.
- In line 9, this pin is turned off, which turns the LED off for 1 2d.
Now that you know the nuts of how to control an Arduino with Python, allow'south get through some applications to collaborate with its inputs and outputs.
Reading Digital Inputs
Digital inputs tin can take only two possible values. In a circuit, each of these values is represented by a different voltage. The table below shows the digital input representation for a standard Arduino Uno board:
| Value | Level | Voltage |
|---|---|---|
| 0 | Low | 0V |
| i | High | 5V |
To control the LED, yous'll use a push button to send digital input values to the Arduino. The button should send 0V to the board when it'south released and 5V to the board when it'south pressed. The effigy below shows how to connect the button to the Arduino board:

You lot may notice that the LED is connected to the Arduino on digital pin 13, but similar before. Digital pin x is used as a digital input. To connect the push button, yous have to use the 10 KOhm resistor, which acts as a pull downwardly in this excursion. A pull down resistor ensures that the digital input gets 0V when the button is released.
When you release the button, you open the connection betwixt the ii wires on the push. Since in that location's no current flowing through the resistor, pin 10 but connects to the ground (GND). The digital input gets 0V, which represents the 0 (or depression) state. When you lot press the button, you apply 5V to both the resistor and the digital input. A current flows through the resistor and the digital input gets 5V, which represents the 1 (or high) state.
Yous can use a breadboard to assemble the above excursion also:

Now that y'all've assembled the circuit, you have to run a plan on the PC to control it using Firmata. This programme will turn on the LED, based on the country of the push button:
i import pyfirmata 2 import time 3 4 board = pyfirmata . Arduino ( '/dev/ttyACM0' ) 5 half-dozen it = pyfirmata . util . Iterator ( board ) 7 information technology . showtime () 8 9 board . digital [ x ] . manner = pyfirmata . INPUT 10 11 while True : 12 sw = board . digital [ 10 ] . read () 13 if sw is True : 14 board . digital [ xiii ] . write ( 1 ) 15 else : 16 board . digital [ xiii ] . write ( 0 ) 17 time . slumber ( 0.1 ) Let's walk through this program:
- Lines 1 and 2 import
pyfirmataandtime. - Line 4 uses
pyfirmata.Arduino()to ready the connectedness with the Arduino board. - Line vi assigns an iterator that volition be used to read the status of the inputs of the circuit.
- Line 7 starts the iterator, which keeps a loop running in parallel with your main code. The loop executes
board.iterate()to update the input values obtained from the Arduino board. - Line 9 sets pin x equally a digital input with
pyfirmata.INPUT. This is necessary since the default configuration is to employ digital pins as outputs. - Line eleven starts an space
whileloop. This loop reads the status of the input pin, stores it insw, and uses this value to plow the LED on or off by changing the value of pin xiii. - Line 17 waits 0.1 seconds between iterations of the
whileloop. This isn't strictly necessary, but it's a nice trick to avoid overloading the CPU, which reaches 100% load when in that location isn't a wait control in the loop.
pyfirmata also offers a more than meaty syntax to work with input and output pins. This may exist a expert option for when you're working with several pins. You can rewrite the previous program to have more than compact syntax:
1 import pyfirmata 2 import fourth dimension iii 4 board = pyfirmata . Arduino ( '/dev/ttyACM0' ) 5 six it = pyfirmata . util . Iterator ( board ) 7 it . first () viii ix digital_input = board . get_pin ( 'd:ten:i' ) 10 led = lath . get_pin ( 'd:13:o' ) 11 12 while True : 13 sw = digital_input . read () 14 if sw is Truthful : 15 led . write ( one ) sixteen else : 17 led . write ( 0 ) 18 time . slumber ( 0.one ) In this version, you use board.get_pin() to create two objects. digital_input represents the digital input state, and led represents the LED land. When you run this method, you have to pass a string argument composed of 3 elements separated by colons:
- The type of the pin (
afor analog ordfor digital) - The number of the pivot
- The mode of the pivot (
ifor input orofor output)
Since digital_input is a digital input using pin x, yous pass the argument 'd:10:i'. The LED state is gear up to a digital output using pin 13, so the led argument is 'd:thirteen:o'.
When you use board.get_pin(), at that place'south no need to explicitly set up pivot 10 as an input similar you did before with pyfirmata.INPUT. After the pins are set, you tin can access the status of a digital input pin using read(), and set the status of a digital output pin with write().
Digital inputs are widely used in electronics projects. Several sensors provide digital signals, like presence or door sensors, that can be used as inputs to your circuits. However, in that location are some cases where you'll need to measure analog values, such every bit distance or physical quantities. In the next section, you'll run across how to read analog inputs using Arduino with Python.
Reading Analog Inputs
In contrast to digital inputs, which can only be on or off, analog inputs are used to read values in some range. On the Arduino Uno, the voltage to an analog input ranges from 0V to 5V. Appropriate sensors are used to measure physical quantities, such as distances. These sensors are responsible for encoding these physical quantities in the proper voltage range so they can be read by the Arduino.
To read an analog voltage, the Arduino uses an analog-to-digital converter (ADC), which converts the input voltage to a digital number with a stock-still number of bits. This determines the resolution of the conversion. The Arduino Uno uses a 10-fleck ADC and can determine 1024 dissimilar voltage levels.
The voltage range for an analog input is encoded to numbers ranging from 0 to 1023. When 0V is applied, the Arduino encodes it to the number 0. When 5V is applied, the encoded number is 1023. All intermediate voltage values are proportionally encoded.
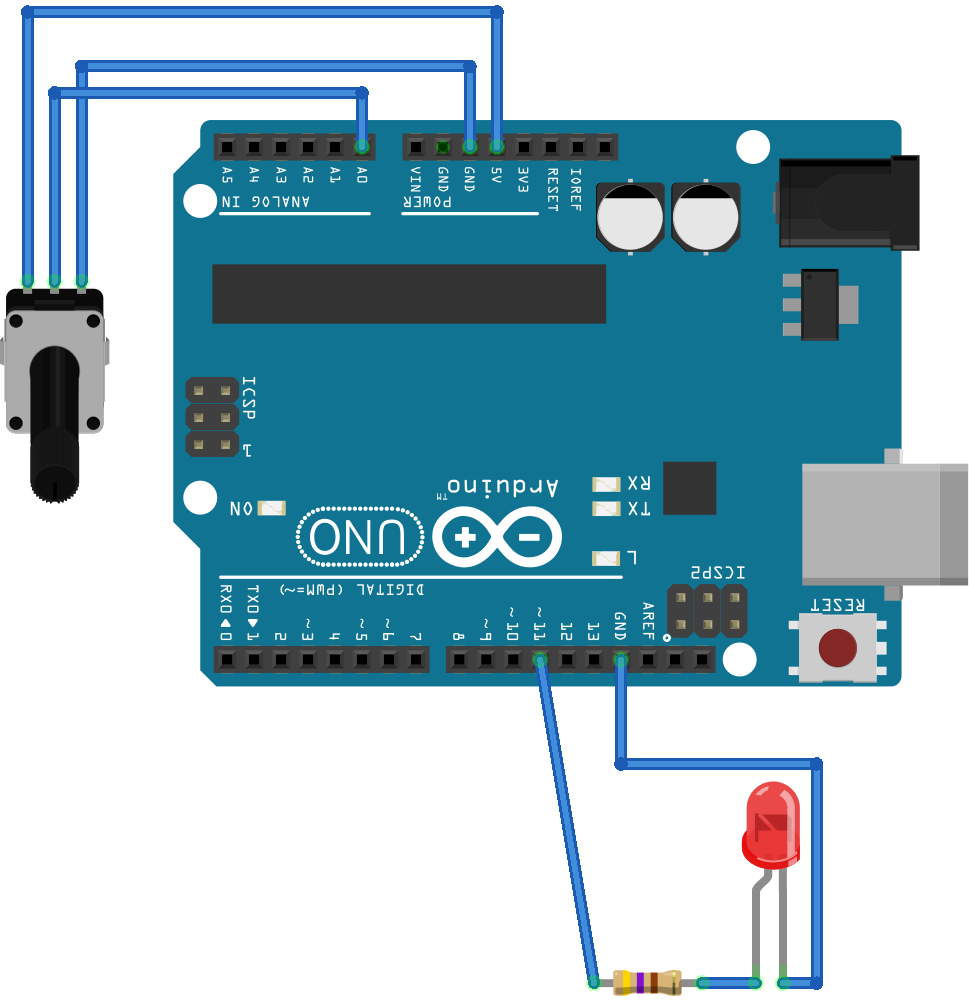
A potentiometer is a variable resistor that you can use to set the voltage applied to an Arduino analog input. You'll connect it to an analog input to control the frequency of a blinking LED:

In this excursion, the LED is gear up just as before. The end terminals of the potentiometer are connected to ground (GND) and 5V pins. This way, the central terminal (the cursor) tin have any voltage in the 0V to 5V range depending on its position, which is connected to the Arduino on analog pin A0.
Using a breadboard, you lot can get together this excursion as follows:

Earlier you control the LED, yous can use the excursion to bank check the different values the Arduino reads, based on the position of the potentiometer. To practice this, run the following program on your PC:
1 import pyfirmata two import time 3 4 board = pyfirmata . Arduino ( '/dev/ttyACM0' ) 5 it = pyfirmata . util . Iterator ( board ) 6 it . showtime () 7 eight analog_input = board . get_pin ( 'a:0:i' ) 9 10 while True : 11 analog_value = analog_input . read () 12 print ( analog_value ) 13 time . slumber ( 0.1 ) In line eight, you lot set up analog_input every bit the analog A0 input pivot with the argument 'a:0:i'. Inside the infinite while loop, you lot read this value, store it in analog_value, and display the output to the console with print(). When you motion the potentiometer while the program runs, you should output similar to this:
0.0 0.0293 0.1056 0.1838 0.2717 0.3705 0.4428 0.5064 0.5797 0.6315 0.6764 0.7243 0.7859 0.8446 0.9042 0.9677 1.0 1.0 The printed values change, ranging from 0 when the position of the potentiometer is on one end to 1 when it's on the other stop. Notation that these are float values, which may require conversion depending on the application.
To change the frequency of the blinking LED, you lot can employ the analog_value to control how long the LED will be kept on or off:
1 import pyfirmata 2 import time 3 four board = pyfirmata . Arduino ( '/dev/ttyACM0' ) five it = pyfirmata . util . Iterator ( board ) half dozen it . start () vii 8 analog_input = board . get_pin ( 'a:0:i' ) 9 led = board . get_pin ( 'd:xiii:o' ) x 11 while True : 12 analog_value = analog_input . read () 13 if analog_value is non None : 14 delay = analog_value + 0.01 fifteen led . write ( 1 ) 16 time . slumber ( delay ) 17 led . write ( 0 ) eighteen time . sleep ( filibuster ) 19 else : 20 fourth dimension . sleep ( 0.1 ) Here, you calculate delay equally analog_value + 0.01 to avoid having delay equal to zero. Otherwise, information technology'south mutual to get an analog_value of None during the first few iterations. To avoid getting an error when running the program, you utilise a conditional in line 13 to test whether analog_value is None. Then y'all command the menstruum of the blinking LED.
Try running the program and irresolute the position of the potentiometer. You lot'll notice the frequency of the blinking LED changes:

Past now, y'all've seen how to apply digital inputs, digital outputs, and analog inputs on your circuits. In the adjacent section, you'll come across how to use analog outputs.
Using Analog Outputs
In some cases, it's necessary to have an analog output to bulldoze a device that requires an analog signal. Arduino doesn't include a real analog output, ane where the voltage could be set to whatsoever value in a sure range. Even so, Arduino does include several Pulse Width Modulation (PWM) outputs.
PWM is a modulation technique in which a digital output is used to generate a signal with variable power. To do this, it uses a digital indicate of constant frequency, in which the duty cycle is changed co-ordinate to the desired power. The duty cycle represents the fraction of the period in which the indicate is set to loftier.
Non all Arduino digital pins tin can be used as PWM outputs. The ones that can be are identified by a tilde (~):

Several devices are designed to be driven by PWM signals, including some motors. It'south even possible to obtain a real analog betoken from the PWM signal if you utilise analog filters. In the previous example, yous used a digital output to turn an LED calorie-free on or off. In this section, y'all'll utilize PWM to command the effulgence of an LED, co-ordinate to the value of an analog input given by a potentiometer.
When a PWM signal is applied to an LED, its brightness varies co-ordinate to the duty cycle of the PWM bespeak. You're going to utilise the post-obit circuit:
This circuit is identical to the one used in the previous section to test the analog input, except for one difference. Since information technology's non possible to utilise PWM with pivot 13, the digital output pivot used for the LED is pin 11.
You can use a breadboard to assemble the circuit as follows:

With the circuit assembled, you lot can control the LED using PWM with the following program:
one import pyfirmata ii import time three four board = pyfirmata . Arduino ( '/dev/ttyACM0' ) 5 6 it = pyfirmata . util . Iterator ( board ) vii it . start () viii ix analog_input = board . get_pin ( 'a:0:i' ) x led = board . get_pin ( 'd:xi:p' ) eleven 12 while True : 13 analog_value = analog_input . read () fourteen if analog_value is not None : 15 led . write ( analog_value ) xvi time . slumber ( 0.ane ) There are a few differences from the programs you lot've used previously:
- In line 10, you set
ledto PWM mode past passing the argument'd:xi:p'. - In line xv, you phone call
led.write()withanalog_valueas an argument. This is a value betwixt 0 and 1, read from the analog input.
Here you tin can see the LED behavior when the potentiometer is moved:

To show the changes in the duty cycle, an oscilloscope is plugged into pin 11. When the potentiometer is in its aught position, y'all can see the LED is turned off, every bit pivot eleven has 0V on its output. As you plow the potentiometer, the LED gets brighter as the PWM duty cycle increases. When you turn the potentiometer all the way, the duty cycle reaches 100%. The LED is turned on continuously at maximum brightness.
With this example, you've covered the basics of using an Arduino and its digital and analog inputs and outputs. In the next section, you'll see an application for using Arduino with Python to drive events on the PC.
Using a Sensor to Trigger a Notification
Firmata is a overnice way to get started with Arduino with Python, merely the demand for a PC or other device to run the awarding can be plush, and this approach may non be practical in some cases. Nonetheless, when it'southward necessary to collect data and ship information technology to a PC using external sensors, Arduino and Firmata make a adept combination.
In this section, you'll use a push continued to your Arduino to mimic a digital sensor and trigger a notification on your machine. For a more practical application, you can retrieve of the button push as a door sensor that will trigger an alarm notification, for example.
To display the notification on the PC, yous're going to use Tkinter, the standard Python GUI toolkit. This will show a message box when yous press the button. For an in-depth intro to Tkinter, check out Python GUI Programming With Tkinter.
You'll need to assemble the same circuit that you used in the digital input instance:
After yous assemble the excursion, utilise the following program to trigger the notifications:
i import pyfirmata two import fourth dimension 3 import tkinter 4 from tkinter import messagebox v six root = tkinter . Tk () 7 root . withdraw () 8 9 board = pyfirmata . Arduino ( '/dev/ttyACM0' ) 10 eleven it = pyfirmata . util . Iterator ( board ) 12 it . start () thirteen 14 digital_input = board . get_pin ( 'd:ten:i' ) 15 led = board . get_pin ( 'd:thirteen:o' ) 16 17 while Truthful : 18 sw = digital_input . read () 19 if sw is True : 20 led . write ( 1 ) 21 messagebox . showinfo ( "Notification" , "Button was pressed" ) 22 root . update () 23 led . write ( 0 ) 24 fourth dimension . sleep ( 0.i ) This plan is similar to the 1 used in the digital input case, with a few changes:
- Lines three and 4 import libraries needed to set up Tkinter.
- Line 6 creates Tkinter's main window.
- Line 7 tells Tkinter not to show the chief window on the screen. For this case, you only need to meet the bulletin box.
- Line 17 starts the
whileloop:- When you press the button, the LED will turn on and
messagebox.showinfo()displays a message box. - The loop pauses until the user presses OK. This fashion, the LED remains on as long equally the message is on the screen.
- After the user presses OK,
root.update()clears the message box from the screen and the LED is turned off.
- When you press the button, the LED will turn on and
To extend the notification example, you lot could even utilise the push button to send an email when pressed:
1 import pyfirmata 2 import fourth dimension 3 import smtplib 4 import ssl v six def send_email (): seven port = 465 # For SSL 8 smtp_server = "smtp.gmail.com" 9 sender_email = "<your email address>" 10 receiver_email = "<destination email address>" 11 password = "<password>" 12 message = """Subject: Arduino Notification \n The switch was turned on.""" 13 fourteen context = ssl . create_default_context () 15 with smtplib . SMTP_SSL ( smtp_server , port , context = context ) as server : 16 print ( "Sending email" ) 17 server . login ( sender_email , password ) 18 server . sendmail ( sender_email , receiver_email , bulletin ) 19 20 lath = pyfirmata . Arduino ( '/dev/ttyACM0' ) 21 22 it = pyfirmata . util . Iterator ( lath ) 23 it . kickoff () 24 25 digital_input = board . get_pin ( 'd:10:i' ) 26 27 while True : 28 sw = digital_input . read () 29 if sw is True : 30 send_email () 31 time . slumber ( 0.1 ) You can acquire more about send_email() in Sending Emails With Python. Here, you lot configure the function with email server credentials, which volition be used to send the email.
With these example applications, you've seen how to utilize Firmata to interact with more than complex Python applications. Firmata lets you use any sensor attached to the Arduino to obtain information for your application. Then you can process the data and make decisions within the master awarding. You can even use Firmata to send data to Arduino outputs, controlling switches or PWM devices.
If you're interested in using Firmata to interact with more complex applications, then effort out some of these projects:
- A temperature monitor to warning you when the temperature gets too high or low
- An analog light sensor that tin sense when a calorie-free seedling is burned out
- A water sensor that tin automatically plow on the sprinklers when the footing is too dry
Decision
Microcontroller platforms are on the rising, thanks to the growing popularity of the Maker Movement and the Cyberspace of Things. Platforms like Arduino are receiving a lot of attention in particular, as they allow developers just like you lot to use their skills and dive into electronic projects.
Y'all learned how to:
- Develop applications with Arduino and Python
- Use the Firmata protocol
- Control analog and digital inputs and outputs
- Integrate sensors with college-level Python applications
You as well saw how Firmata may be a very interesting alternative for projects that demand a PC and depend on sensor data. Plus, it's an easy way to get started with Arduino if y'all already know Python!
Further Reading
Now that you know the basics of decision-making Arduino with Python, you tin starting time working on more circuitous applications. At that place are several tutorials that can help y'all develop integrated projects. Here are a few ideas:
-
Residue APIs: These are widely used to integrate unlike applications. You could apply Remainder with Arduino to build APIs that get data from sensors and transport commands to actuators. To learn about REST APIs, check out Python REST APIs With Flask, Connexion, and SQLAlchemy.
-
Alternate GUIs: In this tutorial, you used Tkinter to build a graphical application. However, in that location are other graphical libraries for desktop applications. To see an alternative, bank check out How to Build a Python GUI Application With wxPython.
-
Threading: The infinite
whileloop that you lot used in this tutorial is a very common feature of Arduino applications. Withal, using a thread to run the chief loop volition let you to execute other tasks concurrently. To learn how to utilise threads, check out An Intro to Threading in Python. -
Face Detection: It's common for IoT apps to integrate motorcar learning and computer vision algorithms. With these, you could build an alarm that triggers a notification when it detects faces on a camera, for instance. To learn more than about facial recognition systems, cheque out Traditional Face Detection With Python.
Lastly, there are other ways of using Python in microcontrollers besides Firmata and Arduino:
-
pySerial: Arduino Uno cannot run Python directly, but you could design your own Arduino sketch and use pySerial to institute a serial connectedness. And then you tin can command Arduino with Python using your own protocol.
-
MicroPython: If you're interested in running Python directly on a microcontroller, then cheque out the MicroPython project. It provides an efficient implementation of Python to exist executed on some microcontrollers such as the ESP8266 and ESP32.
-
SBCs: Another option is to apply a single board computer (SBC) such equally a Raspberry Pi to run Python. SBCs are consummate, Arduino-sized computers that can run a Linux-based operating system, assuasive you to use vanilla Python. As nigh SBCs provide General-purpose input and output pins, you tin utilize information technology to replace an Arduino on most applications.
Scout Now This tutorial has a related video course created by the Real Python squad. Lookout man it together with the written tutorial to deepen your understanding: Arduino With Python: How to Become Started
Source: https://realpython.com/arduino-python/
{kind=link}
Post a Comment for "How to Read the Files Uploaded on My Arduino Mega Board"